• Class1 : Pysical AI – 모방학습
• Class2 : ROS2 Nav2 & OpenRMF
• 실물 로봇 기반 모방학습
• 실제 데이터 수집 → 학습 → 추론까지 전 과정 경험
• 그리고 가장 중요한 ‘로봇 운영 시나리오 설계’
• 예정 시기 : 2월 말 ~ 3월 초
• 형태 : 오프라인 워크샵
• 위치 : 경기도 안양
• 사용 장비 : 실물 로봇 팔 기반 실습 (OpenARM, so arm혹은 omx, AI Worker)
• 인원 : 약 10~15명 소규모
• 모방학습을 “한 단계 더 깊이” 이해하고 싶은 분!
• End-to-End 학습과 시스템 설계의 경계를 고민 중인 분!
• 시뮬레이터가 아닌 실물 로봇으로 실험해보고 싶은 분!
• 로봇 AI를 연구/서비스/제품 관점에서 바라보고 싶은 분!
• Physical AI 기반 학습
• 듀얼 7 자유도(7-DOF) 팔 / 섬세한 물체 조작
• Vision/Depth 센서(RGB-D 카메라)와 LiDAR를 통해 3D 환경 정보를 수집
• 통합 소프트웨어 지원 – NVIDIA Jetson AGX Orin 기반 컴퓨팅과 ROS 2 기반 제어 체계
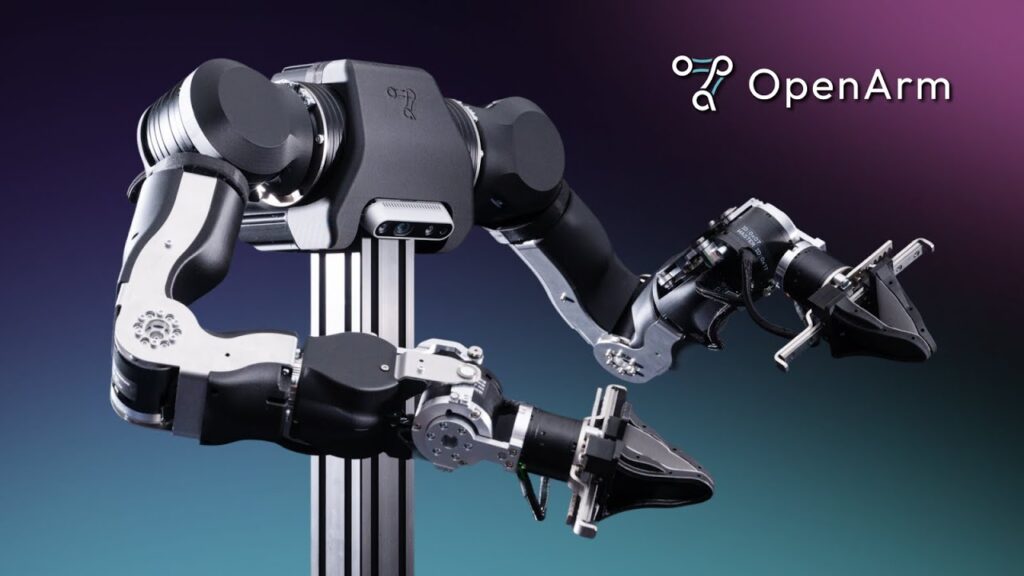
• 7자유도(7 DOF) 휴머노이드 팔
• 오픈소스 하드웨어 & 소프트웨어
• ROS2 통합: MoveIt, Gazebo, MuJoCo 같은 시뮬레이션 및 모션 플래닝 지원
• 백드라이버블(Backdrivable) & 컴플라이언트 구조
: 관절이 인간과 직접 접촉해도 안전하고 부드러운 상호작용 가능.
• Nav2(ROS2 네비게이션 툴킷) 지원
• 자율주행 관련 심화 기능
• OpenRMF 연동 계획


 사용 장비 및 환경
사용 장비 및 환경 이런 분께 추천합니다!
이런 분께 추천합니다!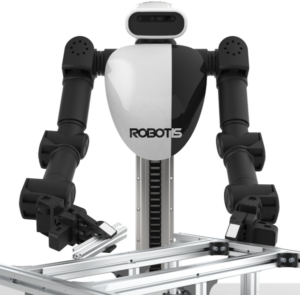
 사용 장비 및 환경 이런 분께 추천합니다!
사용 장비 및 환경 이런 분께 추천합니다!