
이 페이지는 PinkLAB 핑크랩이 진행하는 AI + 로봇 교육 컨텐츠에 대한 상세 페이지입니다.
Part I : Data Analysis
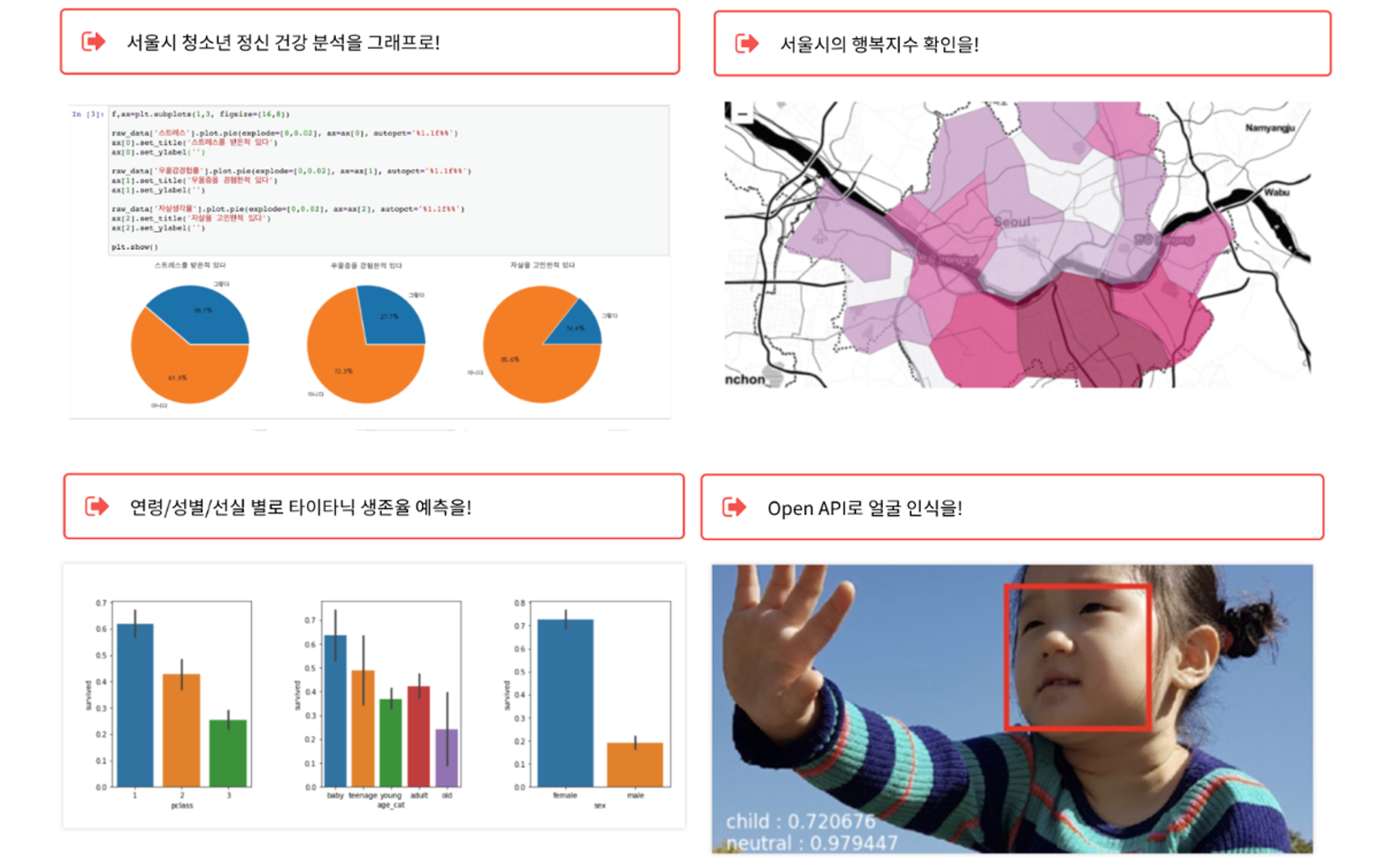
Data EDA
•
데이터를 탐색하는 다양한 주제를 다룹니다.
•
단순한 명령, 단순한 예제가 아니라 하나하나의 큰 주제가 프로젝트형으로 구성되어 있습니다.
•
Python을 활용하여 다양한 프로젝트를 수행합니다.
SQL and GIT
•
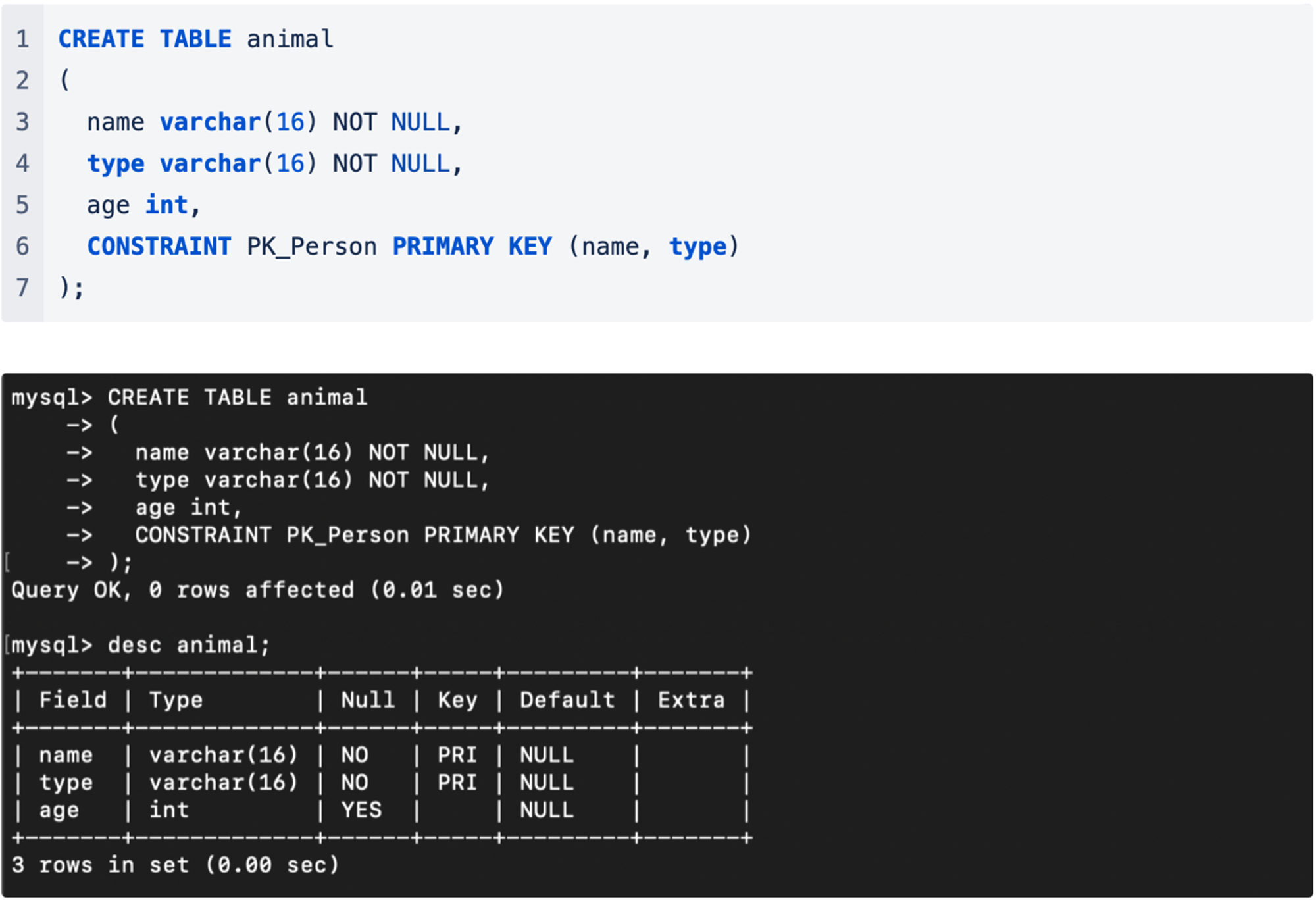
데이터를 다루는 엔지니어들의 필수 SQL을 핑크랩은 기초부터 심화과정까지 구성하고 있습니다.
•
다양한 프로젝트를 통해 스스로 DB를 구성하고 데이터 파이프라인을 구성합니다.
•
또한 핑크랩의 모든 교육컨텐츠를 통한 프로젝트는 수강생들이 GIT으로 관리하도록 유도하고 있습니다.
•
회사에서 너무나 당연해서 묻지도 않는 GIT 필수입니다.
OpenCV
•
딥러닝, 로봇 등 이미지를 다루는 분야에서 빠지지 않는 도구는 OpenCV입니다.
•
핑크랩은 방대한 OpenCV를 딥러닝과 로봇 분야에서 많이 사용할 것들을 정리하여 커리큘럼을 구성하였습니다.
Part II : ML / DL
Machine Learning
•
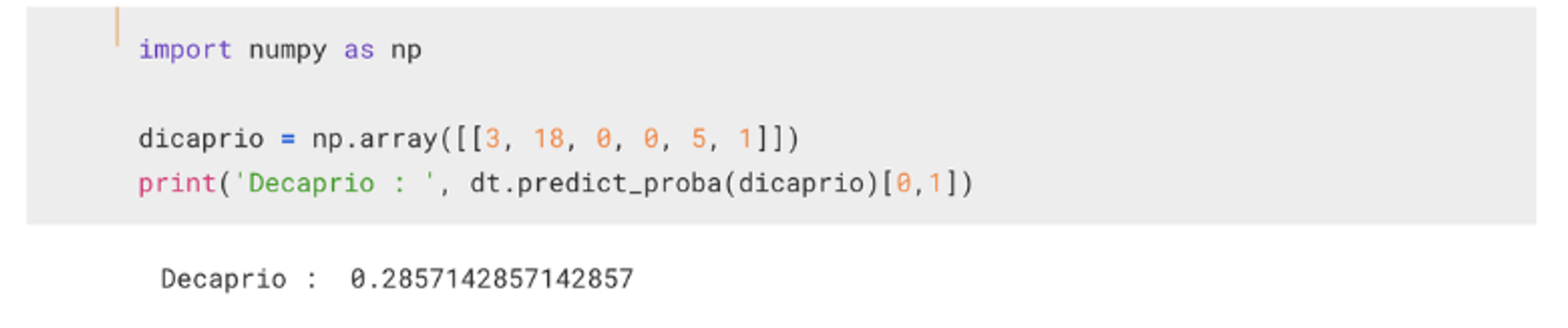
영화 타이타닉의 디카프리오 역할의 남성 승객이 정말 타이타닉 배에 탑승해 있었다면 그의 생존률은 얼마일까요? 머신러닝은 대답할 수 있습니다.
•
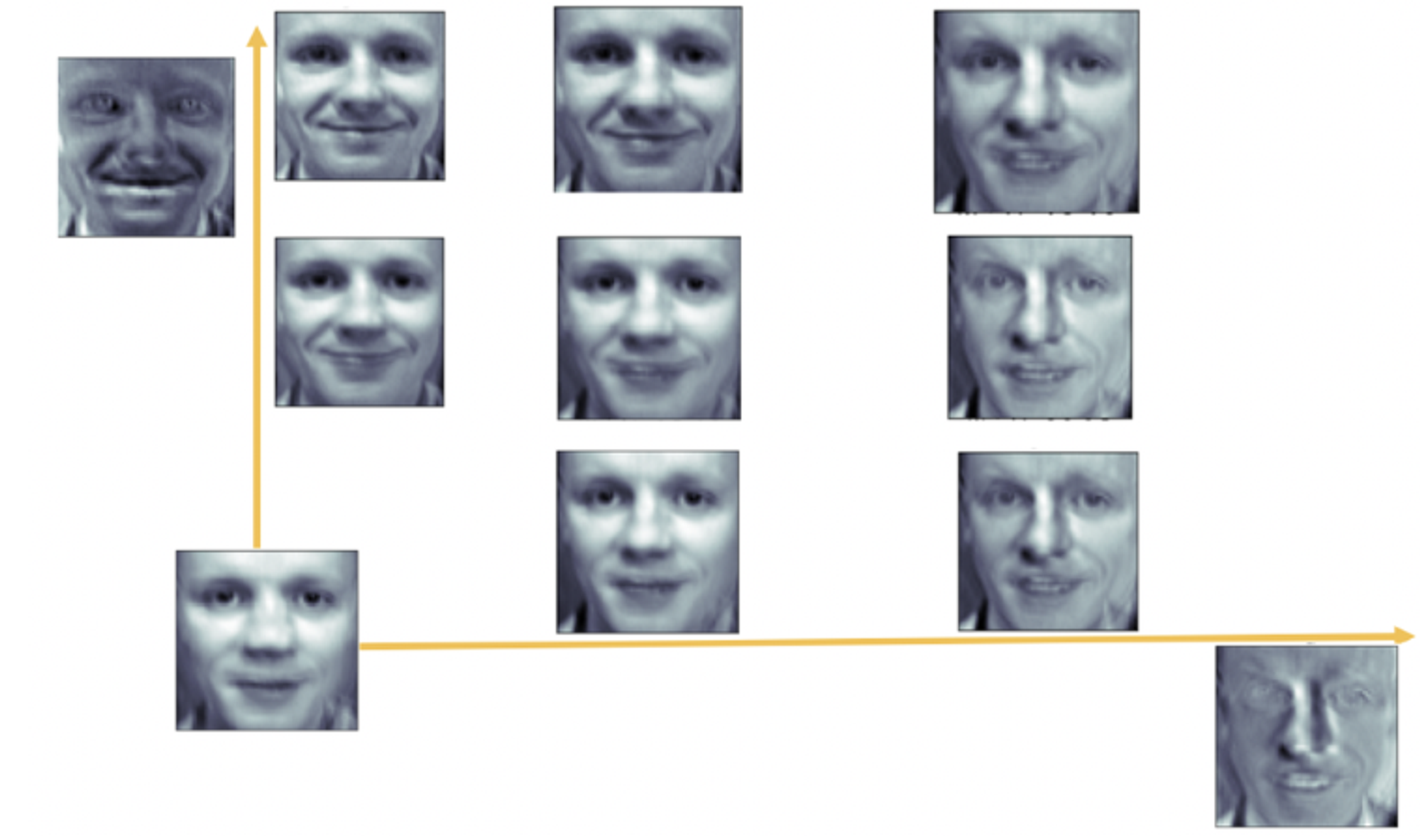
사람의 얼굴에서 특성을 찾아 아주 간단한 방법을 통해 사람의 얼굴을 다시 만들어 낼 수 있습니다.
•
이외에도 간단한 회귀와 분류 문제에서 부터, 앙상블 기법, PCA, 군집 등 다양한 개념을 많은 다양한 예제를 통해 여러분에게 설명하고 있습니다.
Deep Learning
•
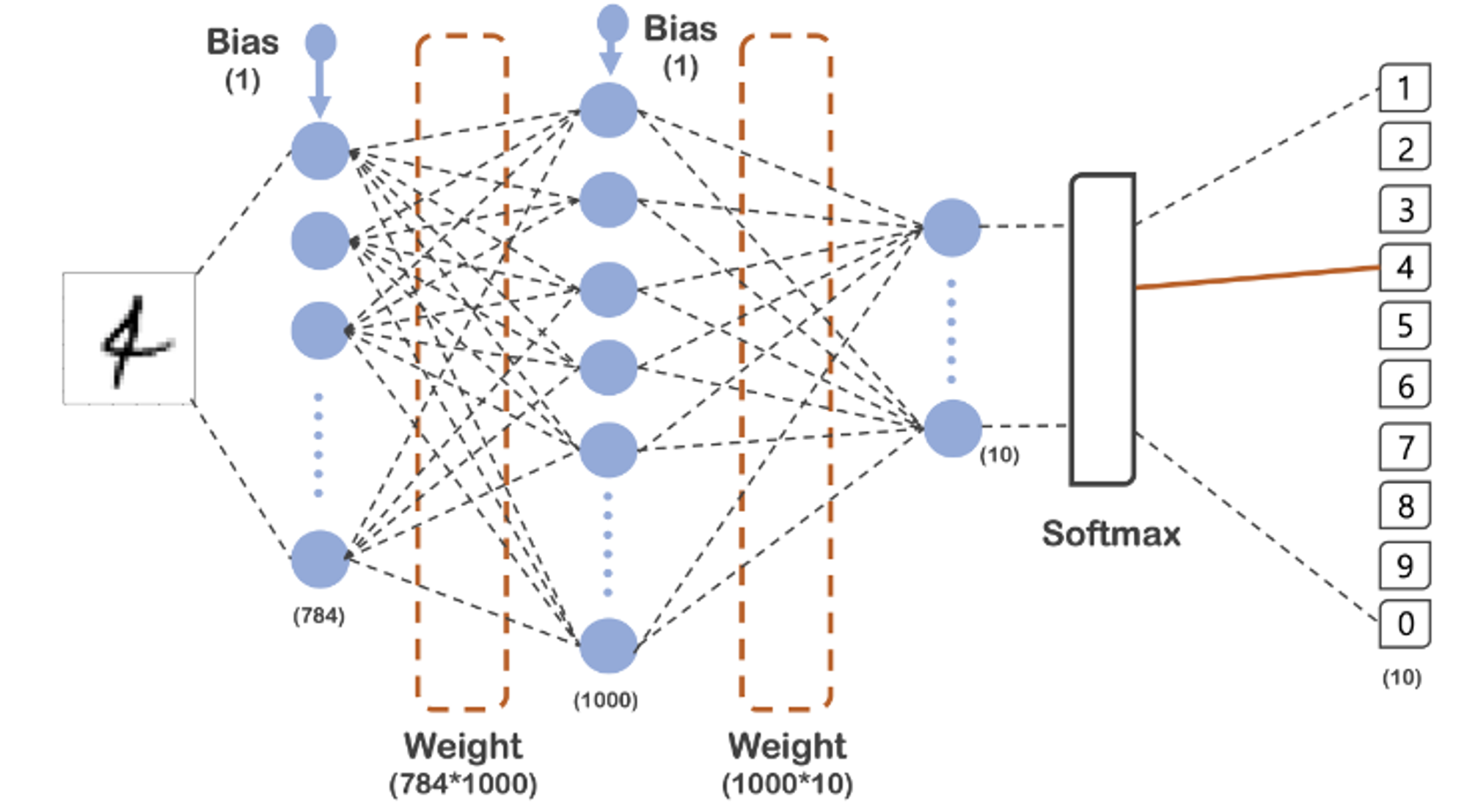
딥러닝의 기초를 쉽고 간단하게 전달하는 방법을 알고 있습니다.
•
기초 딥러닝부터, CNN의 개념까지 여러분들에게 전달할 것입니다.
•
그 외에도 전이학습까지도 전달해서 딥러닝을 이용한 자율주행을 이수하는데 충분히 활용할 수 있도록 합니다.
NLP

•
내가 제시한 문장과 유사한 문장을 찾도록 해보고 싶지 않나요?

•
다른 사람들은 어떤 분야에 관심이 있는지 검색 결과를 시각화하고 싶지 않나요?
•
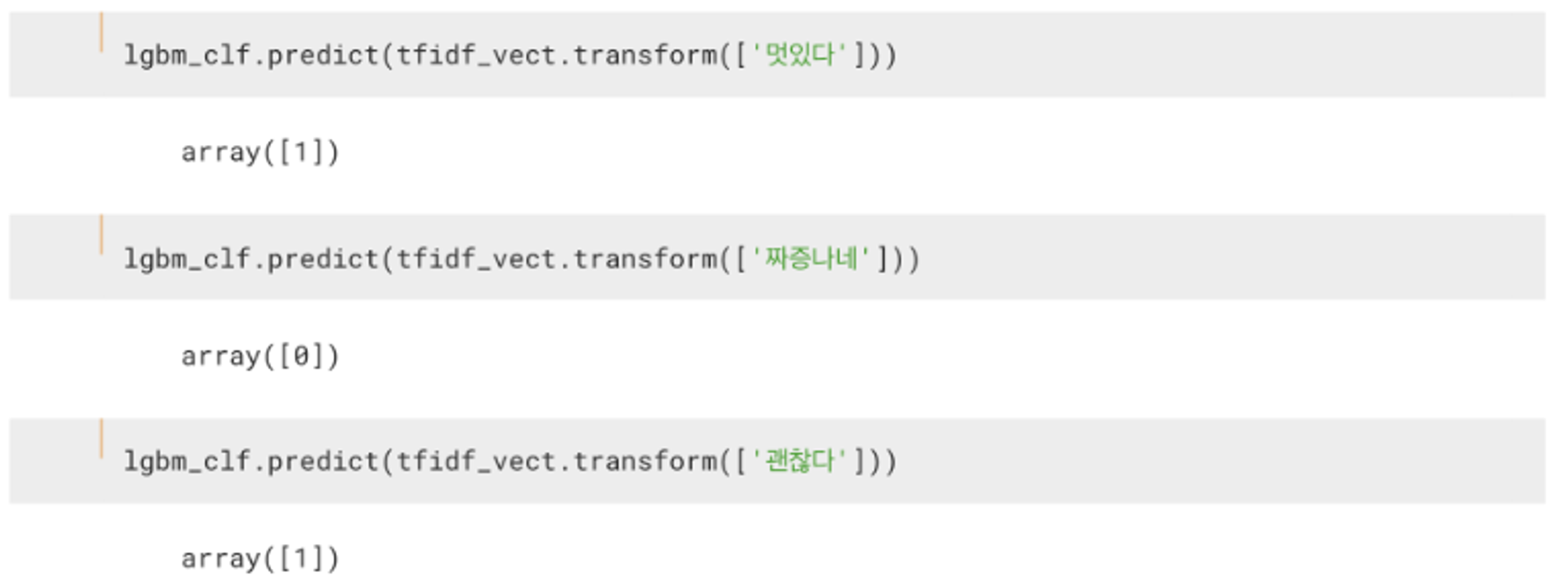
특정한 단어나 문장들을 감성적으로 분류하고 싶지 않나요?
•
이럴때 자연어 처리 기법들이 사용됩니다.
•
자연어처리를 학습한 후 여러분들의 인공지능 능력은 보다 더 업그레이드 됩니다.
YOLO
•
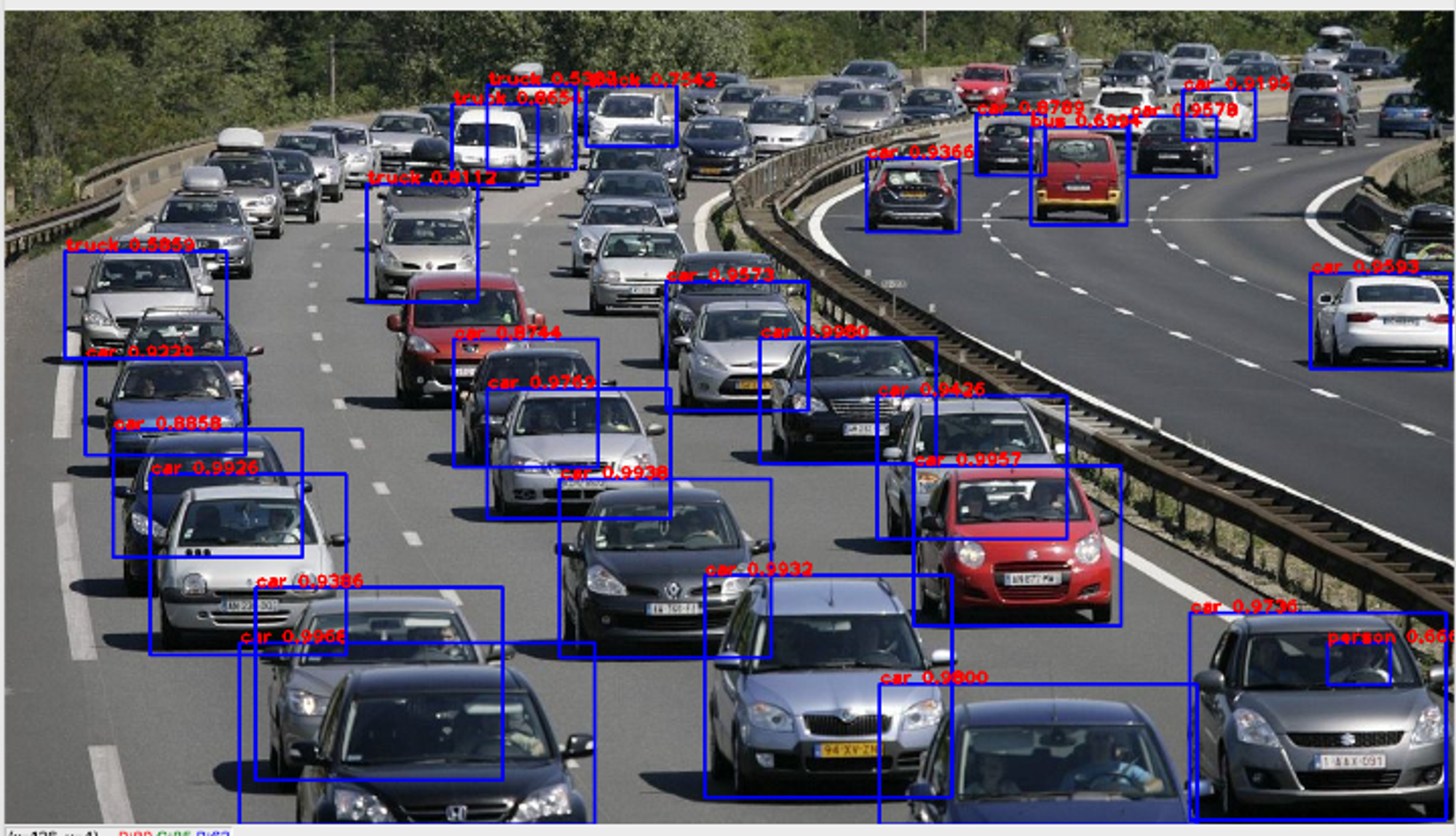
로봇에서는 이미지를 이용한 Object Detection으로 접근할 때가 많습니다.
•
그런 여러분들을 위해 YOLO에 대한 다양한 접근을 제시하고 있습니다.
•
단순히 YOLO를 한번 따라하는 것이 아니라, YOLO를 자연스럽게 사용할 수 있도록 여러 과제를 수행합니다.
Part III : Embedded System and IoT
Arduino
•
로봇이라는 분야는 기계설계, 회로설계, 역학, 기구학, 펌웨어, SW, 알고리즘, 제어이론 등등 많은 분야의 집합입니다.
•
그 중 SW 분야에서는 임베디드시스템이 포함됩니다.
•
여러분들에게 전문적인 마이크로프로세서의 길을 수업하기에는 이 과정이 너무 넓어지기 때문에 힘들지만 일부를 아두이노를 통해 체험할 수 있습니다.
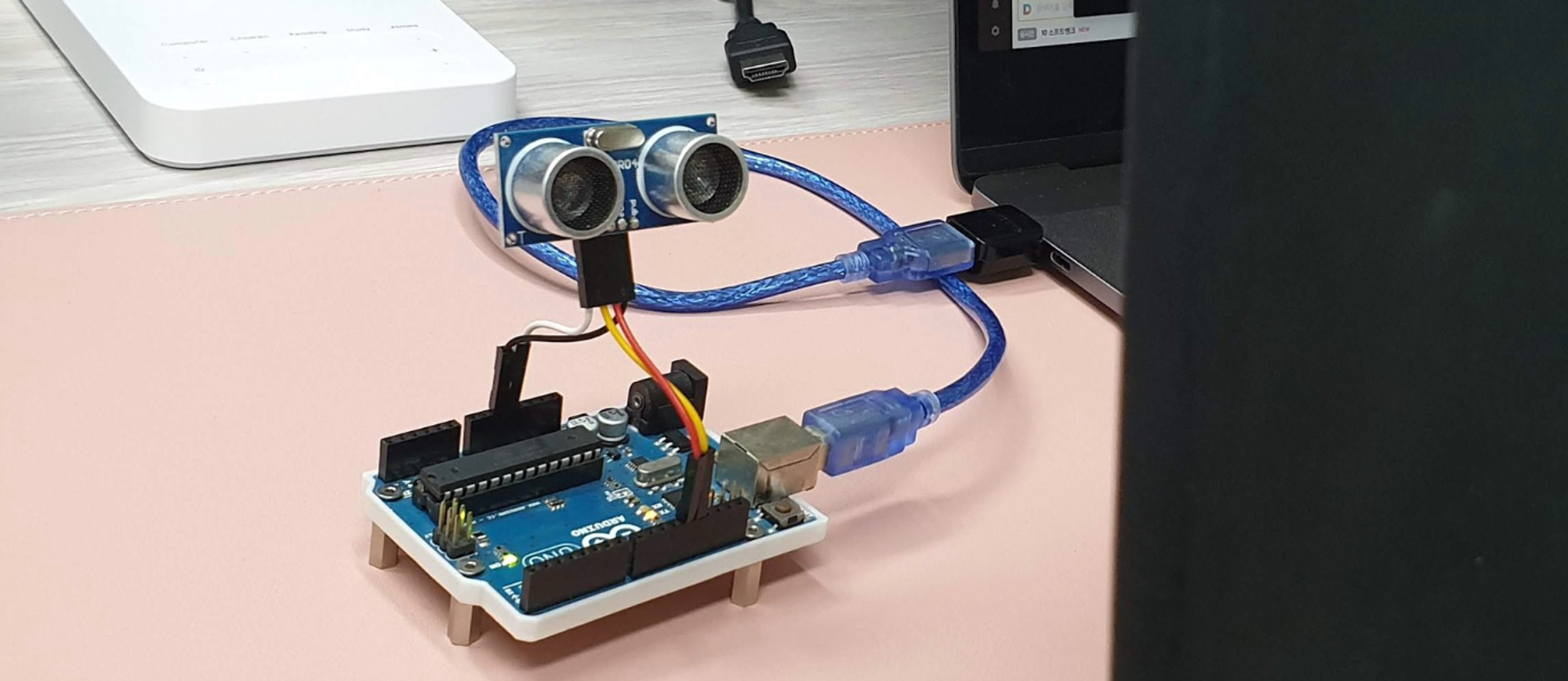
•
본 과정은 아두이노를 통해, 습도, 조도, 마이크 등 다양한 센서를 다루는 방법을 이야기 합니다.
Motor Control and Mobile Robot
•
모바일 로봇 뿐만 아니라 로봇이라면 모터를 꼭 가지고 있게 됩니다.
•
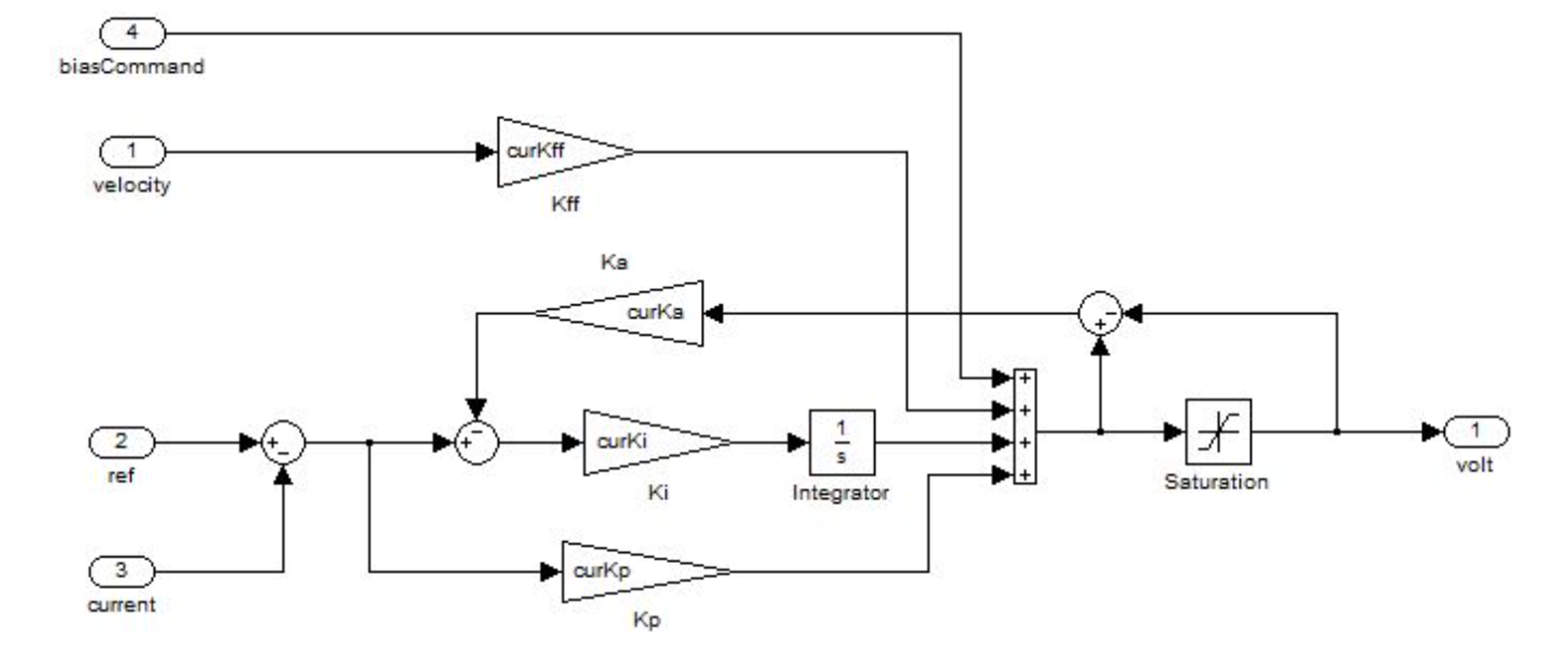
우리 핑크랩은 로봇의 구동에서 필수적인 모터의 제어기법을 다루고 있습니다.
•
여러분들은 PID 제어기를 이용한 two-wheeled mobile robot의 제어기를 직접 구현하는 과정을 경험할 수 있습니다.
IoT
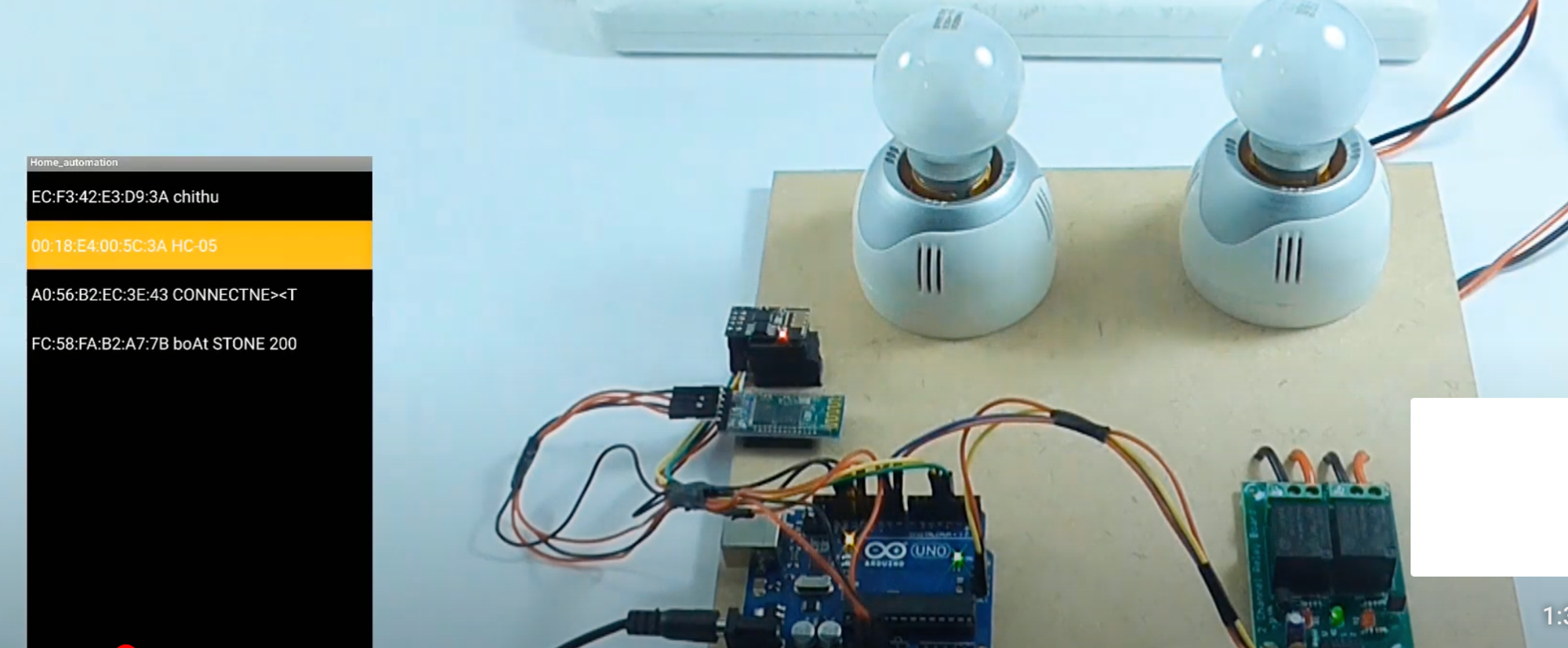
이미지 출처 : skyfi labs
•
여러분이 만든 디바이스에 서버를 구현하고 웹을 통해 디바이스에 접근하게 할 수 있습니다.
•
이를 이용해서 다양한 홈오토메이션 구현을 학습할 수 있습니다.
Part IV : Self Driving for Mobile Robot
ROS basic
•
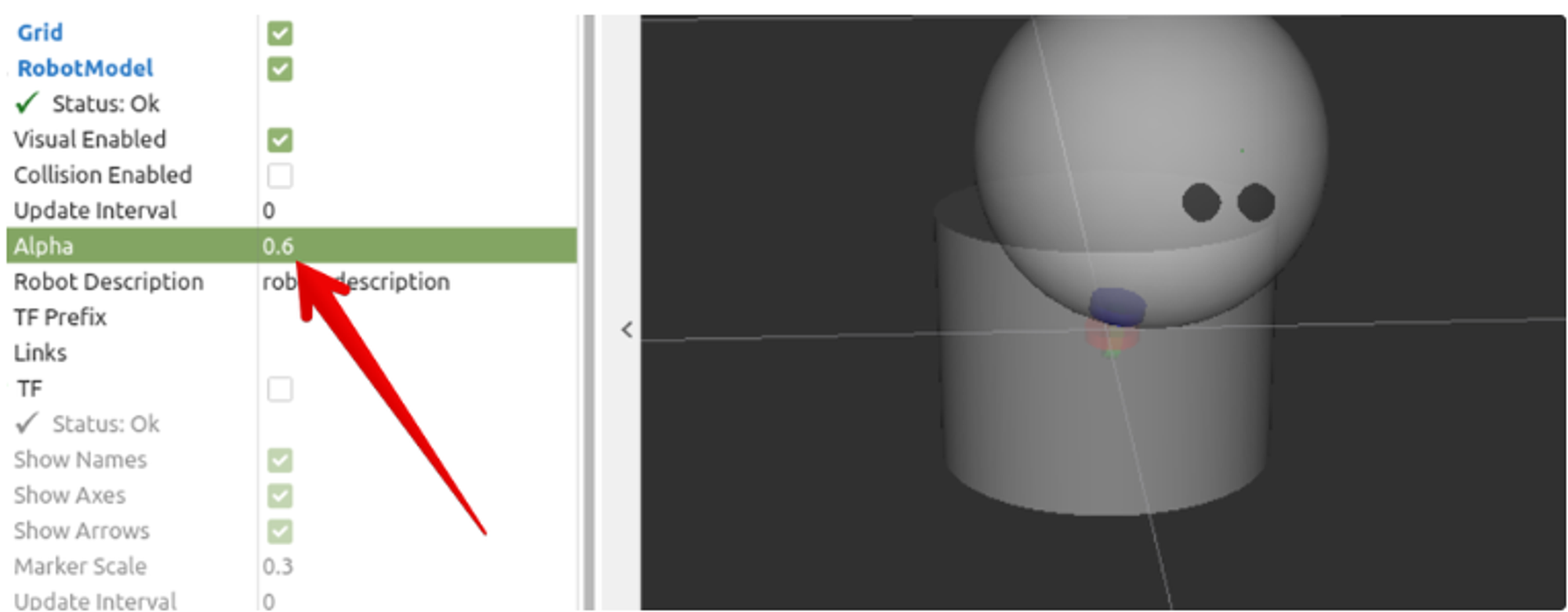
로봇을 학습하거나 구현하는데 많은 도움을 주는 도구 중 가장 주목받고 있는 것은 ROS입니다.
•
여러분에게 단순히 따라하는 수준이 아니라
Mobile Robot and ROS
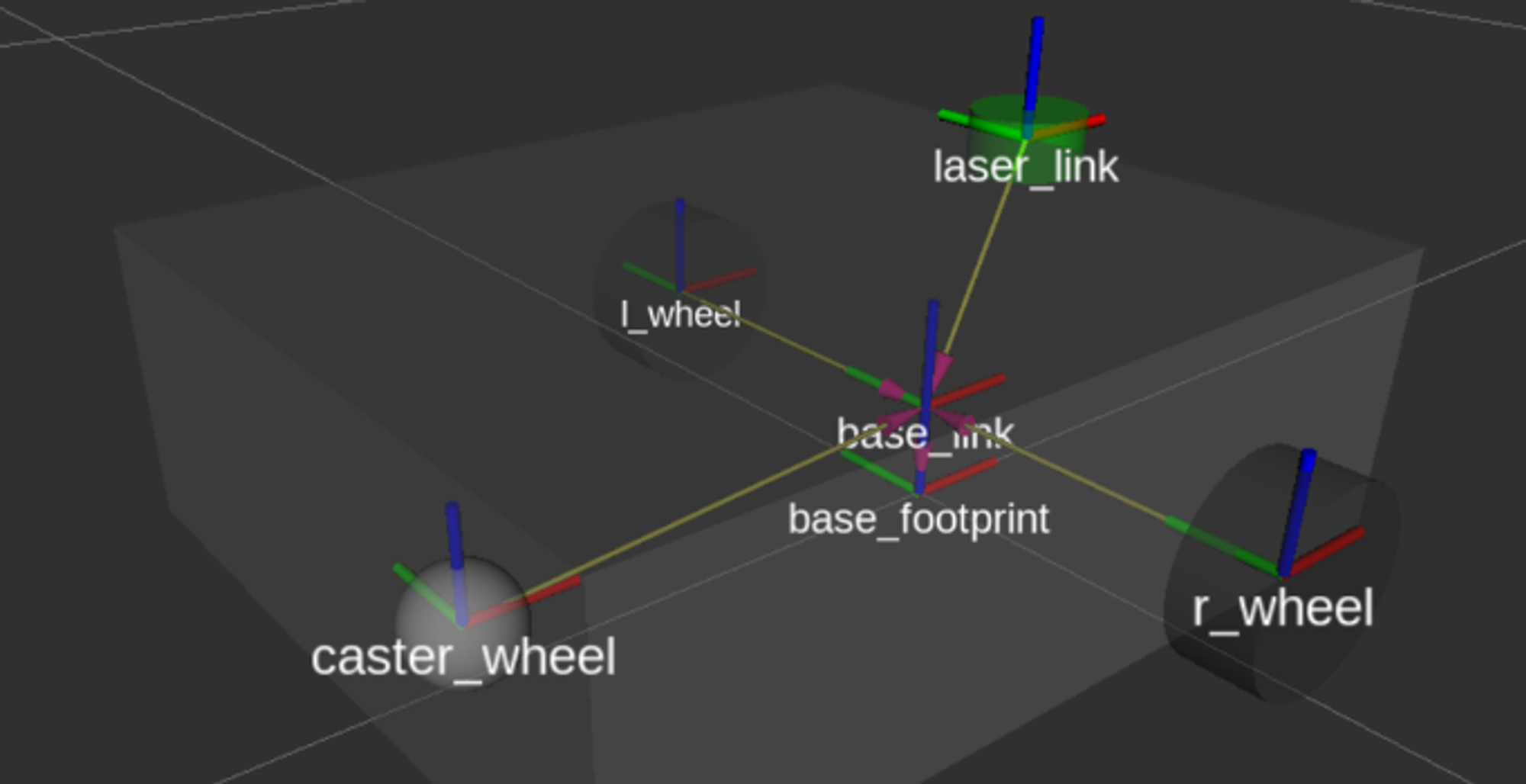
•
여러분들이 ROS를 배웠는데 정작 패키지 하나 스스로 만들 수 없다는 것에 절망한적 없나요?
•
핑크랩의 ROS 컨텐츠는 여러분들이 직접 모바일로봇의 패키지를 구성할 수 있는 능력을 배양합니다.
SLAM and Navigation
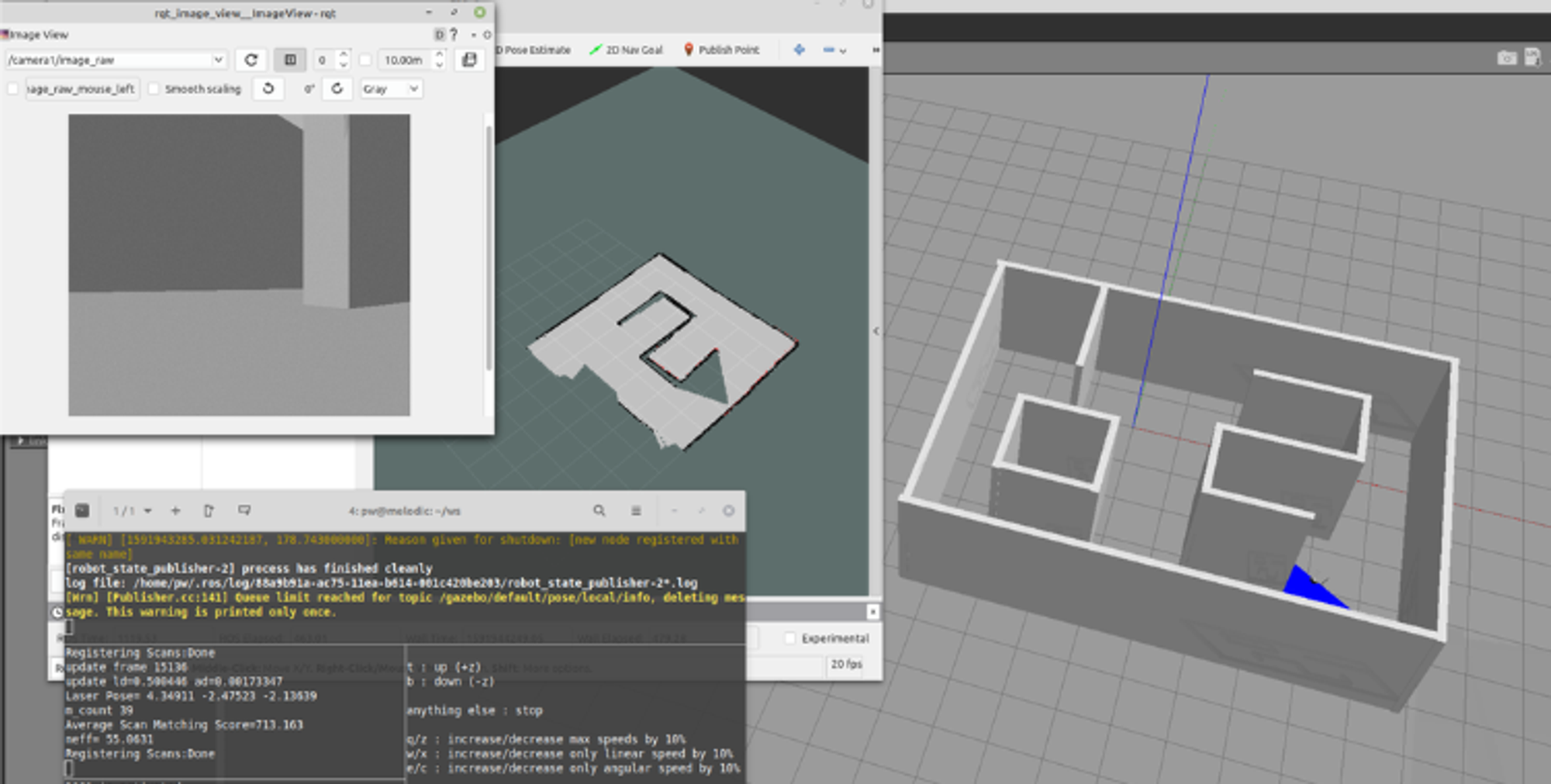
•
모바일 로봇의 LIDAR를 이용하여 직접 SLAM and Nagivation 패키지를 구성할 수 있도록 합니다.
•
이 단계가 되면 여러분들은 자율주행이 가능한 모바일 로봇을 가지게 됩니다.
Self Driving using Deep Learning

•
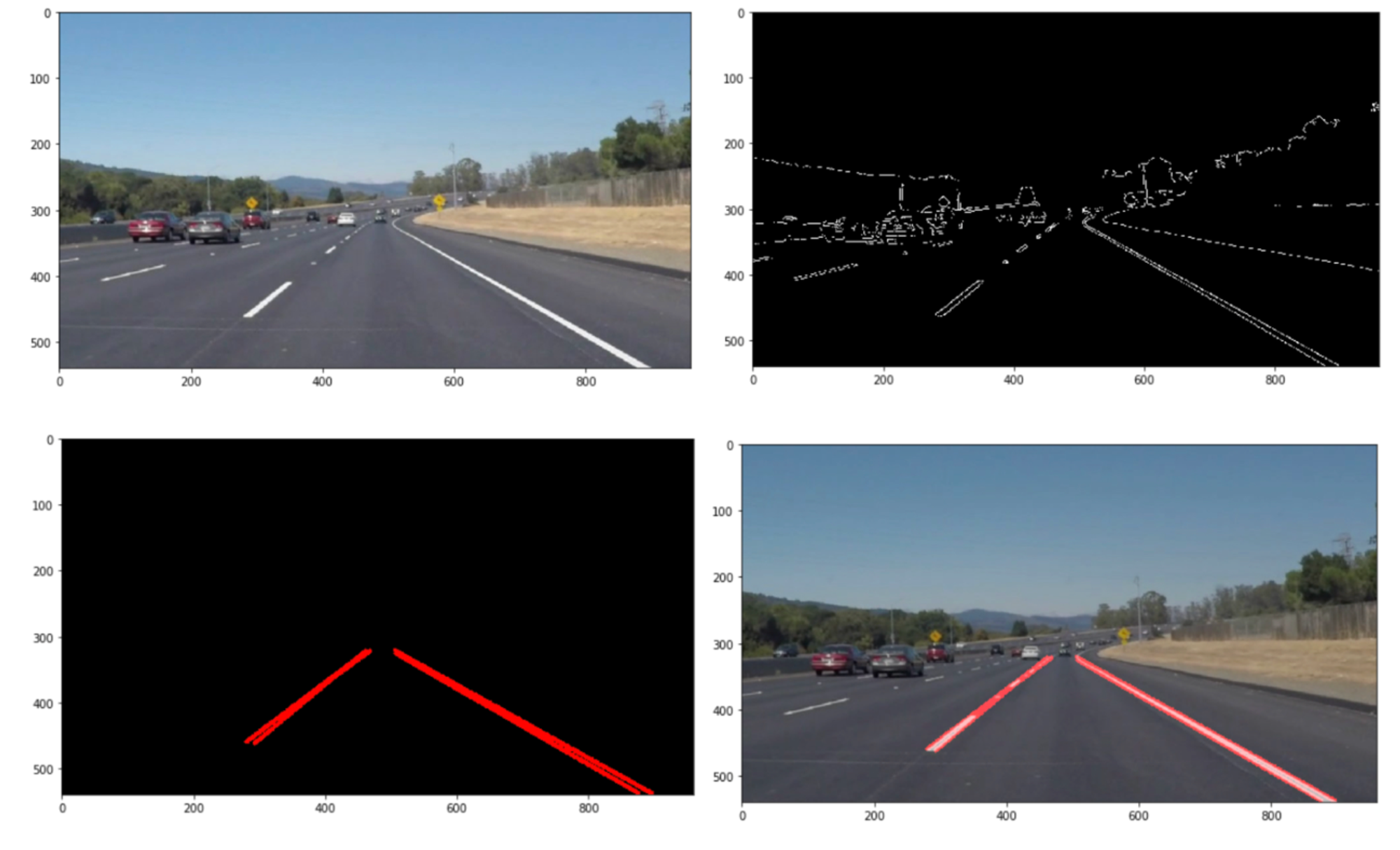
딥러닝을 활용하여 길을 학습한 후 자율주행하는 과정을 배울 수 있습니다.
•
앞서 배운 딥러닝과 주행하는 로봇을 어떻게 접목할 것인지를 여러분들은 고민할 수 있습니다.
Part V : Drone and Deep Learning
Drone and ROS
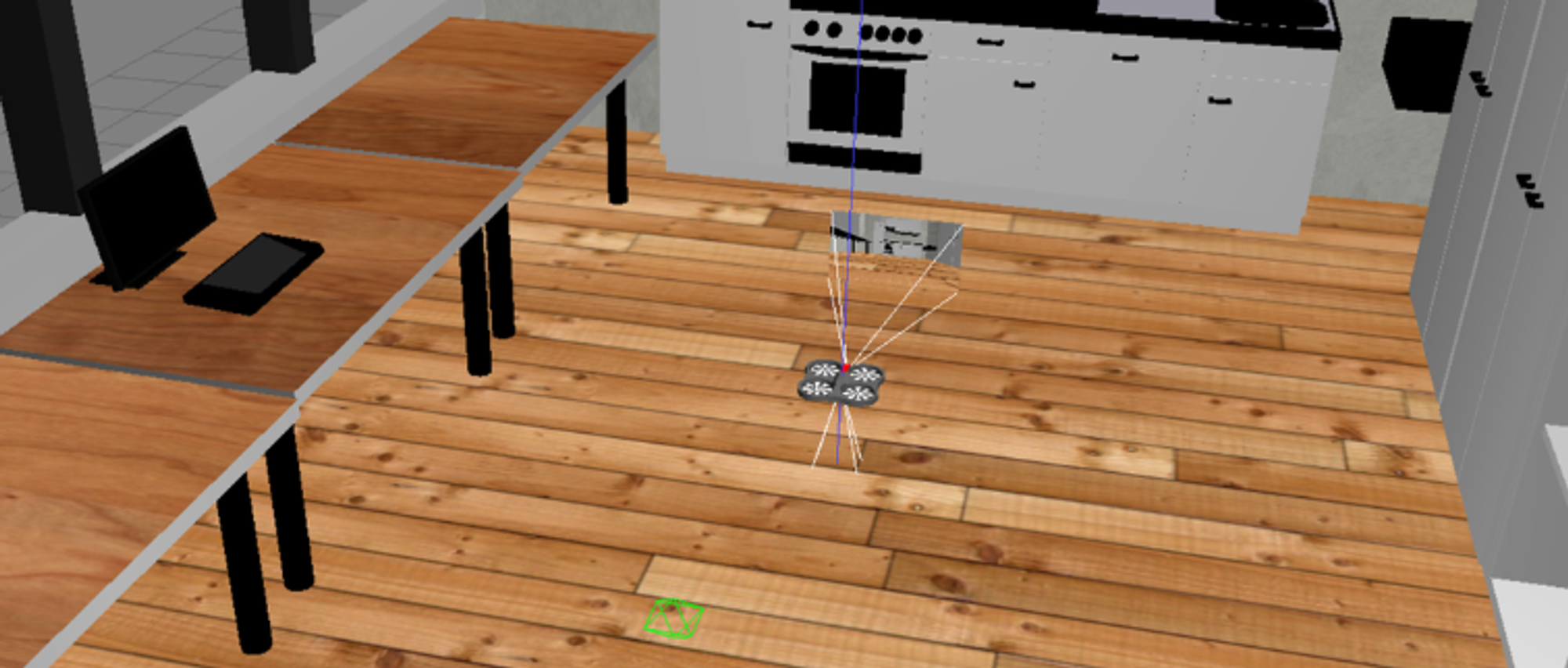
•
드론을 위한 ROS 패키지를 직접 구현합니다.
•
드론을 이용한 다양하고 흥미로운 과제를 진행합니다.
Self Driving using Deep Learning for Drone
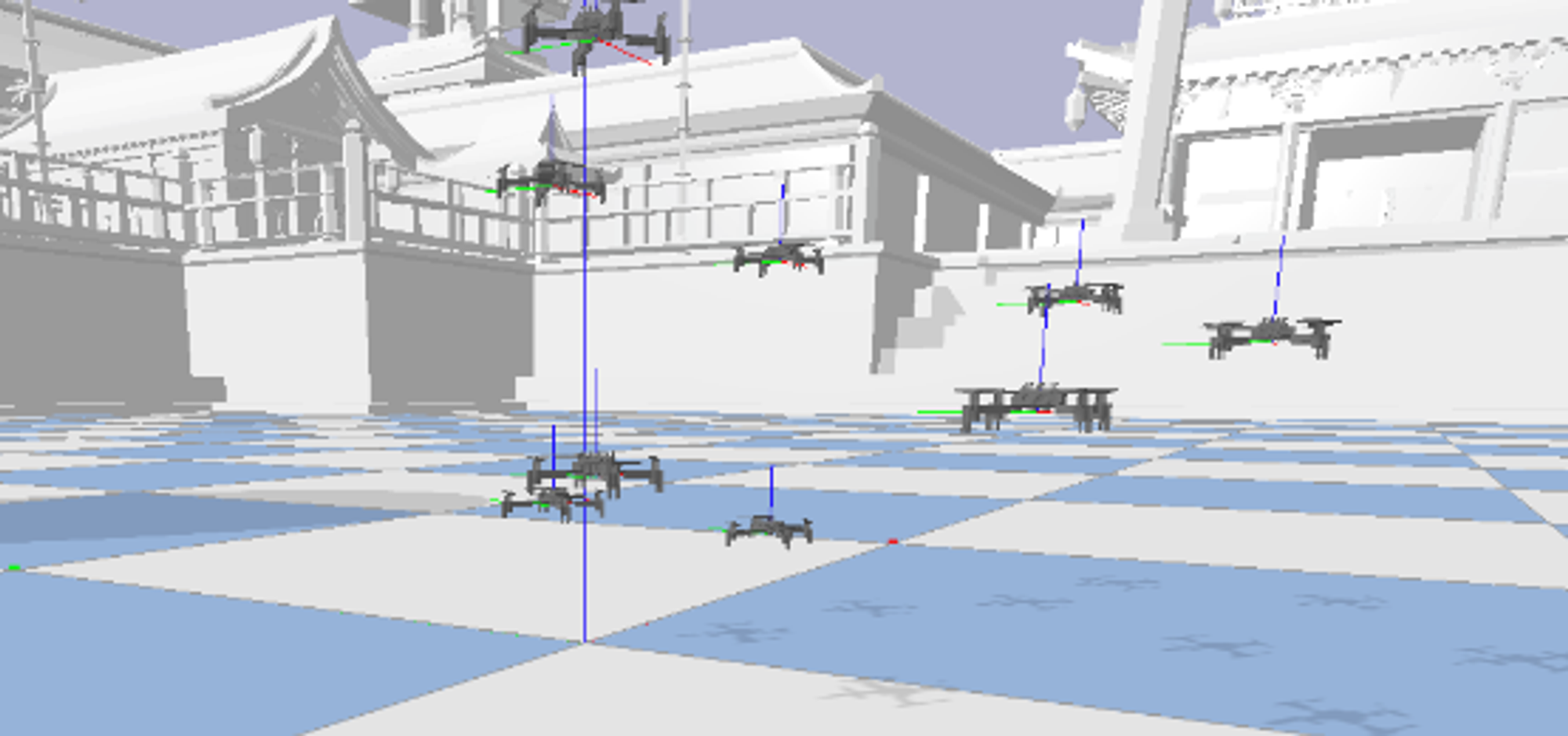
•
딥러닝을 활용한 자율주행 드론을 체험할 수 있습니다.