2일 완성 워크샵

로봇 개발자 워크샵에 오세요!
2일완성
모방학습, 주행관제 경험자가 되자!
CLASS1 : 모방학습 [매진]
CLASS2 : ROS2 Nav2 & Open RMF
CLASS1과 CLASS2는 별도 신청입니다. 관심 있는 CLASS를 선택해 주세요!
워크샵 주제
Class1
매진
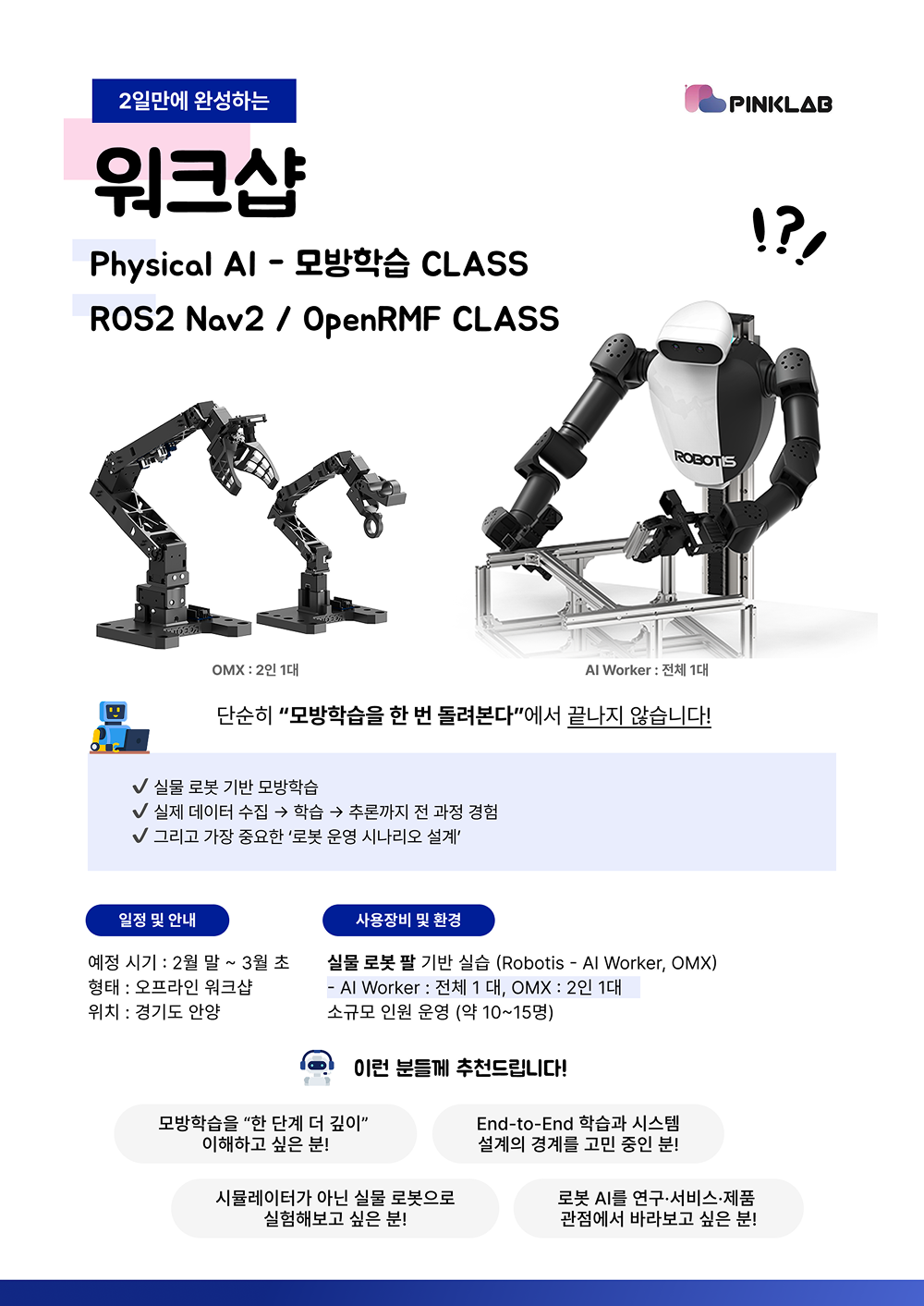
Physical AI – 모방학습
사람의 동작을 로봇이 모방·학습하는 Physical AI 기술 체험.
모방학습 파이프라인을 직접 구성하고 실습합니다.
Class2
ROS2 Nav2 & Open RMF
ROS2 기반 Nav2 자율주행부터 Open RMF 다중 로봇 Fleet 관제까지.
실제 환경 운용 시나리오를 2일 집중 실습합니다.
참가 및 안내
[Class1] 모방학습 매진
- 교육 일정 : 2026.02.23(월) ~ 2026.02.24(화)
- 교육 시간 : 오전 10시 ~ 오후 6시
- 교육 장소 : 경기도 안양시 동안구 벌말로 80, 더에이치타워919 B1 회의실 (관리사무소 옆)
- 정원 : 15명 (선착순)
- 참가 비용 : 1인 55만원 (VAT 포함)
[Class2] ROS2 Nav2 & Open RMF
- 교육 일정 : 2026.03.07(토) ~ 2026.03.08(일)
- 교육 시간 : 오전 10시 ~ 오후 6시
- 교육 장소 : 경기도 안양시 동안구 벌말로 80, 더에이치타워919 802호
- 정원 : 15명 (선착순)
- 참가 비용 : 1인 55만원 (VAT 포함)
주의사항
- 두 CLASS 공통 장소 안내 : 길 건너편 더에이치타워와 혼동 주의하시기 바랍니다.
- 본 워크샵은 Ubuntu 24.04가 설치된 개인 노트북이 필요합니다.
권장 사양 : i7급 CPU, 메모리 16GB 이상 - 주차는 가능하지만 주차비 지원은 어려운 점 참고 부탁드립니다.
주말의 경우 무료 진입 가능
이런 분께 추천합니다!
ROS2를 배웠지만 실제 로봇 운용 경험이 없는 분
Physical AI / 모방학습을 직접 구현해보고 싶은 분
다중 로봇 관제 시스템에 관심 있는 개발자
로봇 분야 취업·창업을 준비 중인 학생 및 연구자
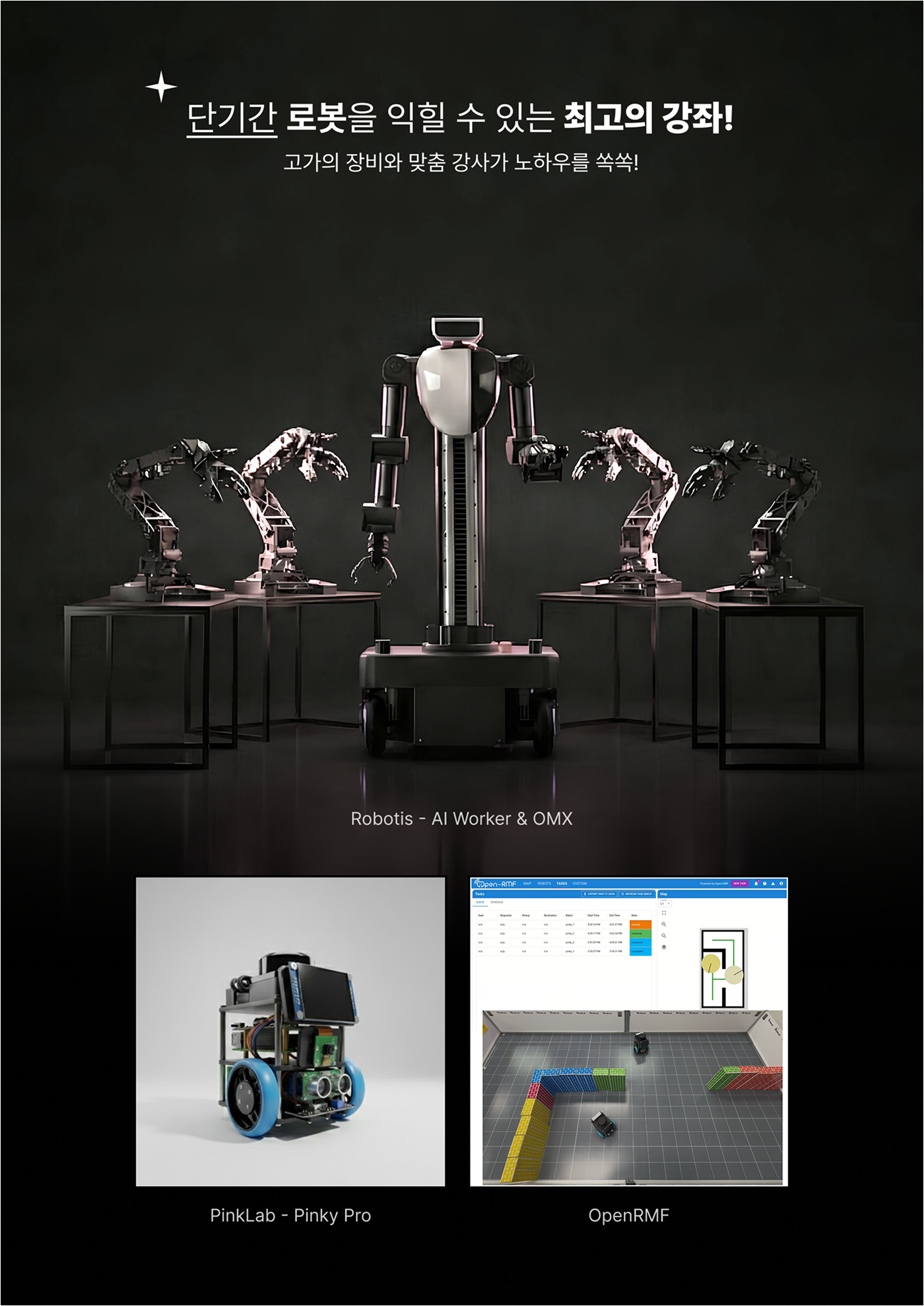
사용 장비

[Robotis] AI Worker
Physical AI 기반 양팔 로봇
- Physical AI 기반 모방학습 실습
- 최대 7 DOF × 2 양팔 구성
- 실시간 원격 조작 및 데이터 수집
- ROS2 지원 / MoveIt2 연동

[Robotis] OMX
자율주행 모바일 로봇
- Nav2 기반 자율주행 실습 플랫폼
- LiDAR + Camera 센서 내장
- Open RMF Fleet 연동 지원
- ROS2 Jazzy 공식 지원

[PinkLab] Pinky Pro
고성능 교육용 로봇
- 핑크랩 자체 개발 교육용 모바일 로봇
- ROS2 기반 운영 환경
- OpenRMF 연동 가능
수업 내용
[Class1]
Physical AI – 모방학습
매진
Day1 · 기초 이론 및 데이터 수집
- 모방학습(Imitation Learning) — 전문가 시연으로 정책을 학습하는 핵심 개념
- AI Worker & OMX 하드웨어 구조 및 ROS2 제어 이해
- 리더–팔로우 방식 텔레오퍼레이션으로 로봇 직접 조작
- 수집 이미지 & 관절 데이터를 파이썬으로 구조화·저장
Day2 · 학습/추론 및 고급 활용
- 수집 데이터 로드 후 모델 학습(Training) 실행
- 파이썬으로 추론 루프 구현 & 안전 정지 기능 추가
- 카메라 Policy 로드 후 입력에 따른 실시간 제어
- 조건부 실행 & FSM(상태 머신)으로 복잡한 제어 로직 완성
[Class2]
ROS2 Nav2 & Open RMF
Day1 · 실물 로봇 기반 SLAM & Nav2
- 로봇의 구동 메커니즘 & ROS2 통신 환경 이해
- 로봇이 주행하는 실제 공간 매핑 (SLAM)
- 최적화된 Nav2 자율주행 환경 구축
- Python API로 목적지 전달 & 모니터링 실습
Day2 · Open-RMF 다중 로봇 통합 관제
- 관제 시스템 이해 & 정교한 트래픽 맵 구축
- 시뮬레이션 기반 Open-RMF 연동 실습
- 실물 로봇 RMF 등록 & HW 정보 공유
- Web Dashboard로 자동 경로 최적화 & 충돌 방지 운영